Motivation
複数の移動体が「安全に」「素早く」「滑らかに」各々の目的地へ移動することができるような自律分散制御手法を構築しようとしています.将来的に,人の多い街なかのような不特定多数の移動体が縦横無尽に行き交うような環境下でも活躍できる自動宅配ロボットのような移動システムに資すると考えています.
Approach
歩行者流を再現するsocial forceモデル[1]に予測に基づいた制御を取り入れることで,上記の要素を満たすシステムの実現を試みています[2]. また, 各移動体が自らに衝突する危険がある移動体に優先して注意を向けるアクティブセンシングを導入することで, 各移動体における計算コストを減らし, ハードウェアへの実装を目指しています.
シミュレーション動画
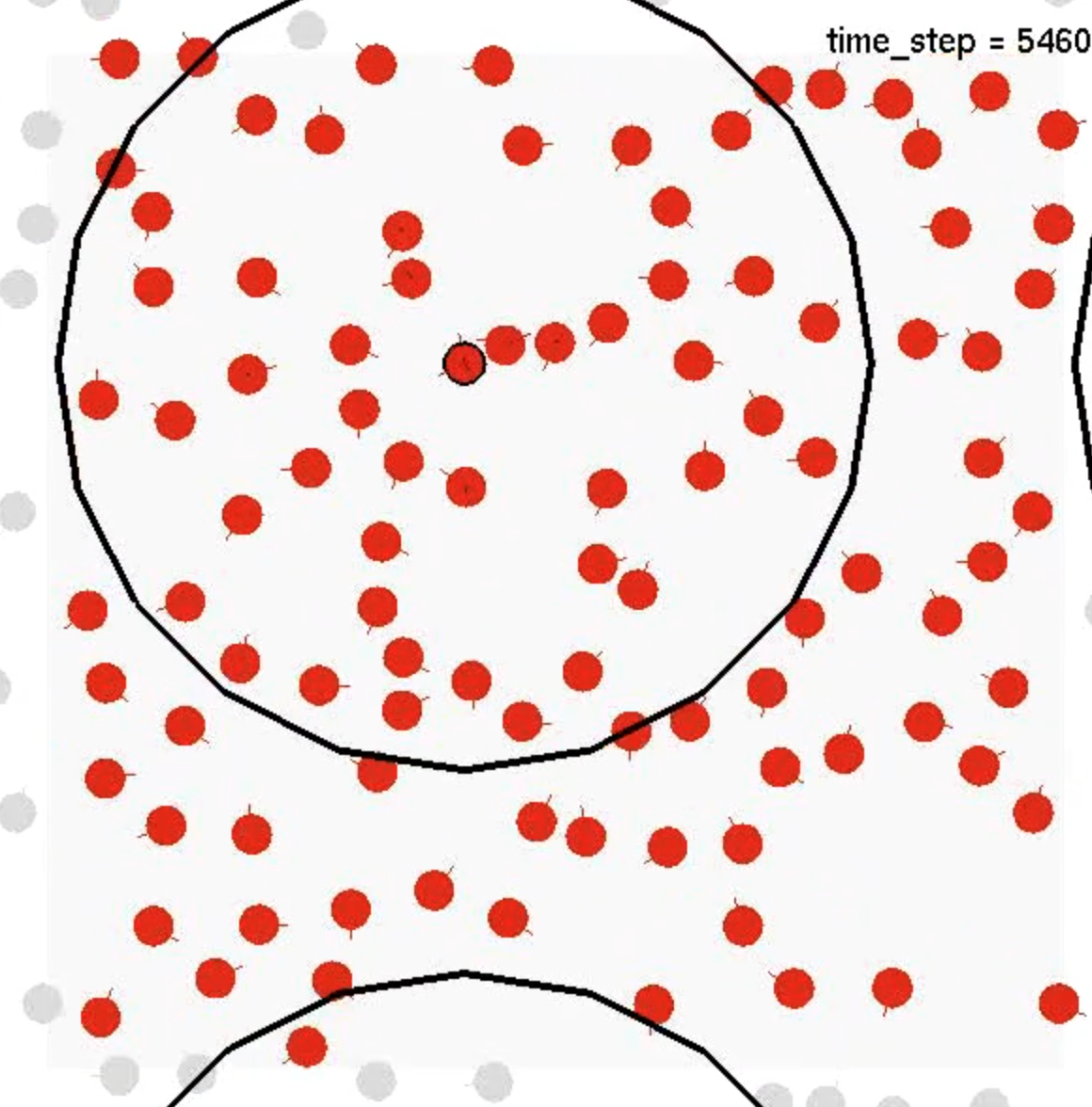 (クリックすると別タブで開きます.)
(クリックすると別タブで開きます.)
[1] D. Helbing, P. Molnar, Social force model for pedestrian dynamics, Phys. Rev. E 51, 4282-4286 (1995)
[2] T. Kano, M. Iwamoto, D. Ueyama, Decentralised control of multiple mobile agents for quick, smooth, and safe movement, Physica A, 572, 125898 (2021)