ロボティクス・生物学に革命を起こす
生き物は驚くほどしなやかかつタフな振る舞いを示します.このような振る舞いがどのような 制御原理(からくり)で実現されているのかはいまだ解明されていません. しかし,もしこのからくりを理解することができれば,既存技術では決して実現し得ないような, あたかも生き物のように動き回るロボットを創り出すことができるだけでなく , 生物学に対しても大いに資することが期待できます. 石黒研究室では,ロボット工学と数理科学,そして生物学を融合した新しい学問領域 (Robotics-inspired biology)の創成を目指して日夜頑張っています! (^^)b
進行中のプロジェクト
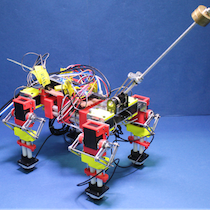
動物の全身を使った移動方法
絶滅した古代動物の運動様式の復元

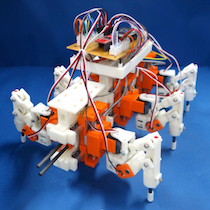
多数の脚を巧みに操る歩行のからくりを探る

ヘビの動きのからくりを,ロボットと共に解き明かす
昆虫はどのように歩いているのか
過去のプロジェクト

集団の維持に資するチスイコウモリの社会性のメカニズムを探る
少数脚(2〜6脚)と多脚(30脚以上)のロコモーションの共通メカニズムを探る

“腕を切られましたが何か?”

原始生物から考える手応え制御
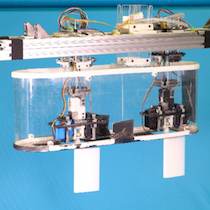
4脚動物にヒントを得た,二足歩行のシンプルベストなCPGモデル
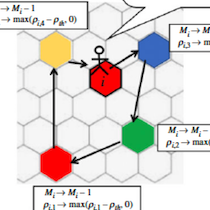
自律分散制御で渋滞解消を目指す

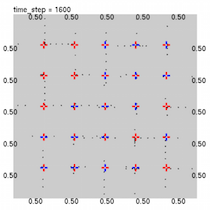
秩序形成の原理を探る
経済活動を考慮したCOVID-19の流行の数理モデリング
