Motivation
子供の頃、体育の時間に先生から「速く走るコツ」を教わったという人は多いと思います。その時教わったことの中には「腿(もも)を高くあげる」という脚の動かし方に関わるものだけでなく、「走り出すときの姿勢」や、「腕の振り方」など、脚以外の動かし方に関するアドバイスも多かったのではないでしょうか?ここから、歩く、走るという運動には脚だけでなく全身が運動に関わっていることがなんとなくわかっていただけるかと思います。
私たちが走る時に腕を振ったり姿勢を意識したりするように、動物も歩行、走行時には体をくねらせたり、首を振ったりと全身を活用することで、歩幅を大きくする、体を安定化させるといった効果的な歩行運動を実現しています。このような全身を活用した動物の運動のメカニズムを理解することができれば、生物のように速く、しなやかで、安定した動きができるロボットが開発できるかもしれません。
Approach
私たちの研究室ではさまざまな動物をモデルに、脚に加えて、頭、胴体、尾などを活用した歩行運動のメカニズムを研究しています。ここではその一例を紹介します。
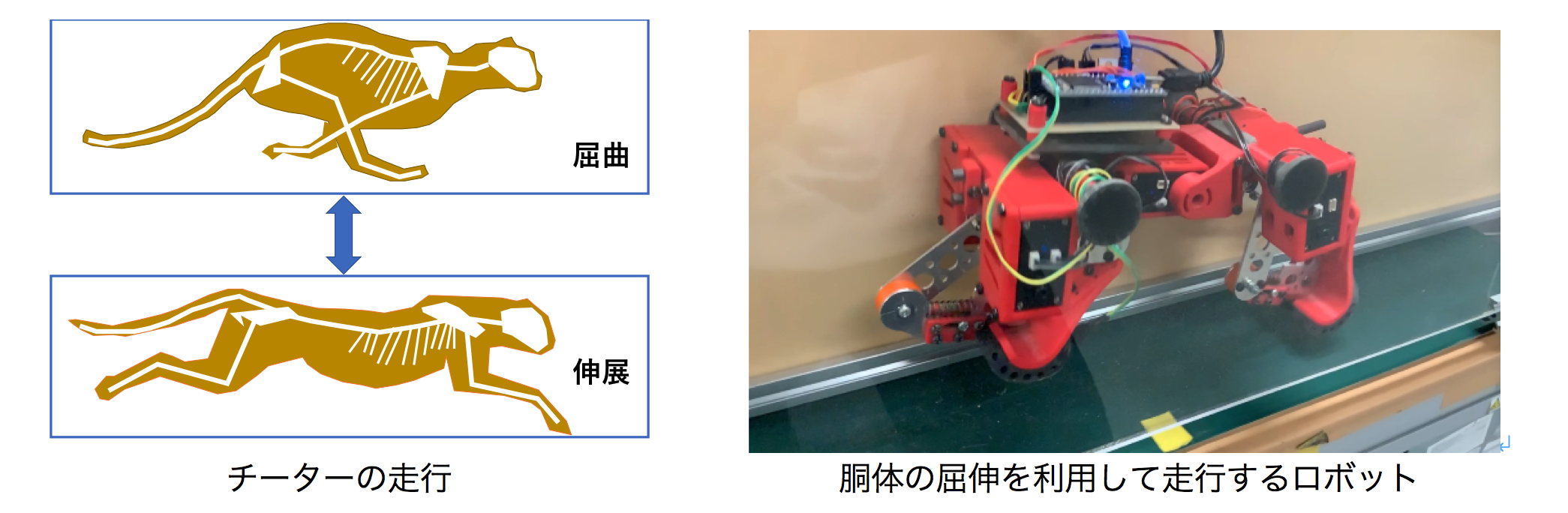
①走行するチーターの背中の曲げ伸ばし運動に注目した制御・ロボット
チーターは走る時、胴体を曲げ伸ばすことで効果的な蹴り出しを実現しています。[1]ここから、脚感覚に合わせた胴体の曲げ伸ばしと、逆に胴体の曲げ伸ばしに合わせた脚の動きによって、チーターに似た走りを実現するロボットを構築しました[2]。胴体を活用することによって足のみで運動していた場合に比べて高い速度とエネルギー効率が実現できることが確認されています。
[1] M. Hildebrand. Motions of the running cheetah and horse. Journal of Mammalogy,40(4):481–495, 1959
[2] Fukuhara, A., Koizumi, Y., Suzuki, S., Kano, T. and Ishiguro, A. (2019). Decentralized control mechanism for body-limb coordination in quadruped running. Adaptive Behavior, 1059712319865180
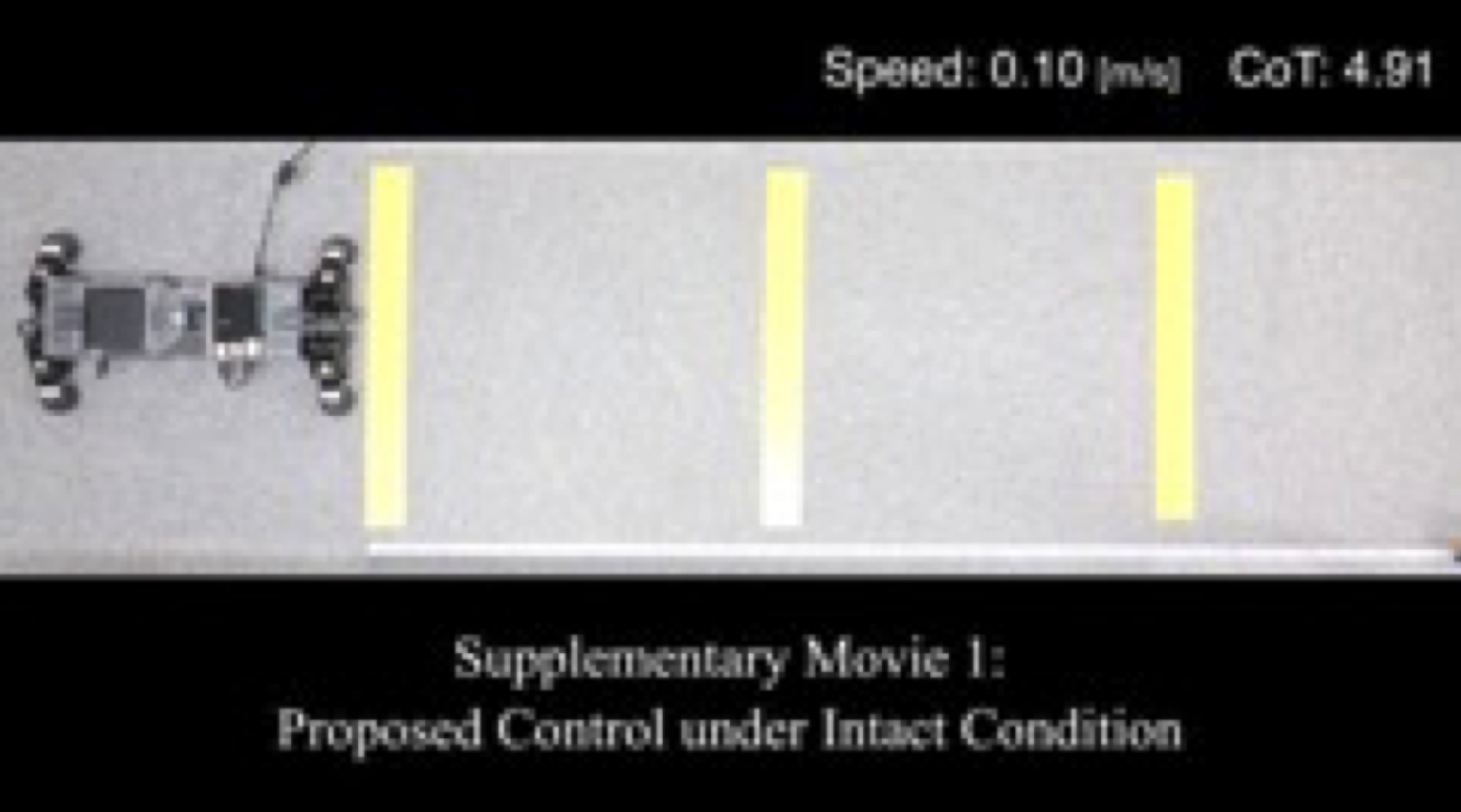
②胴体を活用したトカゲ型歩行の制御・ロボット
トカゲやサンショウウオは短い手足しか持たないので、歩行・走行を行う時は柔らかい胴体をくねらせることで歩幅を大きくし、効率の良い移動を実現しています[3]。この現象に着目し、脚の感覚から胴体を曲げる制御と、胴体の曲がりを活用する脚の制御を考案しています。ロボットによってこの脚と胴体が協調する制御を検証したところ、トカゲに類似する歩行運動が確認できました[4][5]。また、脚と胴体を協調させる制御は脚が故障しても少ないロスで歩行を続けることができるという対故障性に貢献することも確認されました。
 (研究の動画です.クリックすると別タブで開きます.)
(研究の動画です.クリックすると別タブで開きます.)
[3] A. Bicanski, D. Ryczko, J. Knuesel, N. Harischandra, V. Charrier, O. Ekeberg, J-M. Cabelguen, and A. J. Ijspeert. Decoding the mechanisms of gait generation in salamanders by combining neurobiology, modeling and robotics. Biological cybernetics, 107(5):545–564, 2013
[4] S. Suzuki, T. Kano, A. J. Ijspeert, and A. Ishiguro, “Sprawling Quadruped Robot Driven by Decentralized Control with Cross-coupled Sensory Feedback between Legs and Trunk.”, Frontiers in Neurorobotics, 607455, 2021
[5] 鈴木朱羅,加納剛史,Auke J, Ijspeert,石黒章夫:「脚と胴体の協調運動を生み出すトカゲ様四脚歩行ロボットの実験的検証」,日本機械学会ロボティクス・メカトロニクス講演会,2A1-K01,金沢,2020 年5 月
③ウマが示す首振り運動を利用した制御
ウマは歩行や走行に合わせてリズミカルに首を振っています。この首の動きには、歩行で消費するエネルギーを減らす効果や、胴体を安定化させる効果があることが研究されています[6][7]。この現象に着目して、胴体の動きに合わせた首の制御と、胴体の動きに合わせた脚の制御を考案しました[n4]。この胴体の動きを介して首と脚が影響を与え合うモデルのシミュレーションで、ウマが示す脚と首の動きを再現できることが確認されました。
 (研究の動画です.クリックすると別タブで開きます.)
(研究の動画です.クリックすると別タブで開きます.)
[6] D. M. Loscher, F. Meyer, K. Kracht, and J. A. Nyakatura. Timing of head movements is consistent with energy minimization in walking ungulates. Proceedings of the Royal Society B: Biological Sciences, 283(1843):20161908, 2016
[7] 畠中拓海, 松比良賢二, 渋谷恒司, “馬型4 足歩行ロボットの首振りによる歩容の安定に関する研究”, ロボティクス・メカトロニクス講演会講演概要集, 2013 巻, (2013)
[8] 乗田篤志, 鈴木朱羅, 加納剛史, 石黒章夫:(in press)「移動速度に応じた首振り運動を発現可能な四脚ロボットの自律分散制御則」,日本機械学会ロボティクス・メカトロニクス講演会, 2021 年6 月
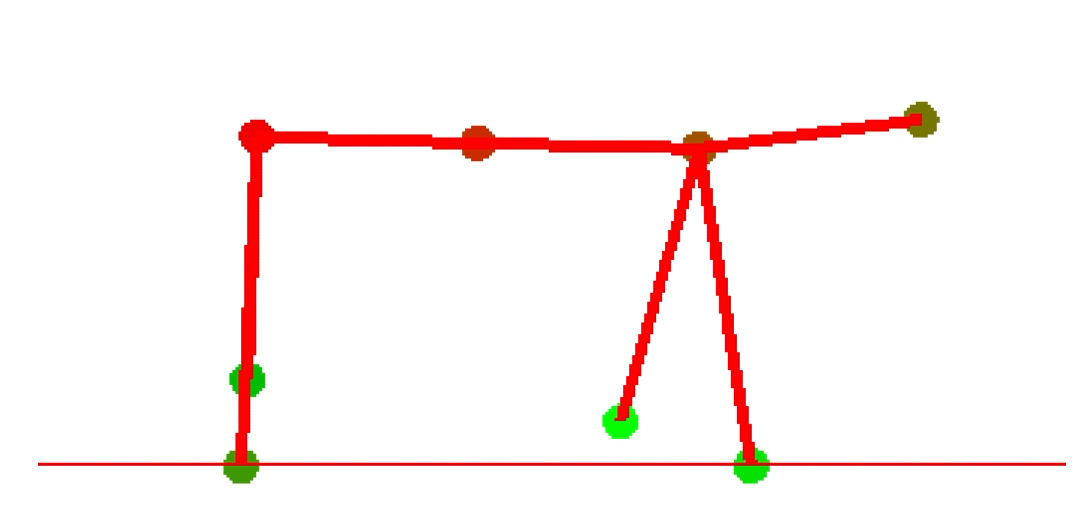
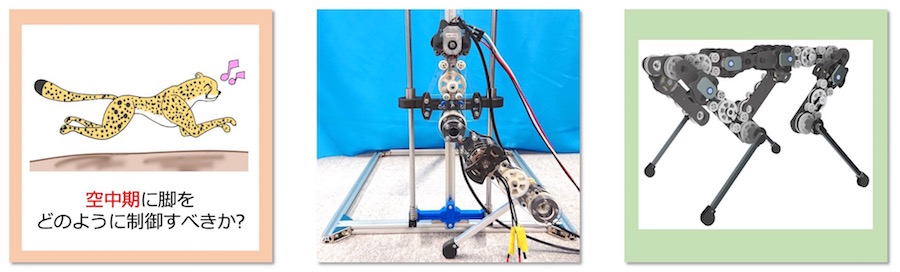
④四脚動物の安定かつ適応的な⾼速⾛⾏に内在する脚制御メカニズム
四脚動物は,⾃⾝の持つ4 本の脚を巧みに操ることで優れた移動能⼒を発揮します.獲物を追いかけるために,チーターは,時速100km/h という⼈間とはかけ離れた速度での⾛⾏を実現し,ユキヒョウは,崖や岩場のような過酷な環境下でも安定した⾛⾏を実現しています.彼らの⾼速⾛⾏のカラクリを理解できれば,⽣物学への貢献のみならず実際の四脚動物に匹敵する移動能⼒を有する四脚ロボットの創⽣に繋がると期待されます.
現在は四脚動物の⾼速⾛⾏のカラクリを理解することを⽬的として,シンプルな脚の制御モデ
ルをデザインしています.特に空中期の脚運動に注⽬したデザインを⾏なっており,シミュ
レーションにて⾃⾝の体⾼ほどある⼤きな段差を⾶び降りながらの安定した⾼速⾛⾏の再
現に⾄りました[1].現在は,考案した制御モデルの妥当性を実世界環境下で検証すること
を⽬指して,脚ロボットの製作に励んでいます[2].
[1] ⼩泉幸煕, 鈴⽊朱羅, ⾺場智主, 福原洸, 加納剛史, ⽯⿊章夫, “四脚動物の⾼速⾛⾏に
おける脚間協調メカニズムの再考," 第32 回⾃律分散システム・シンポジウム予稿集, 2A1,
2019.
[2] ⾺場智主, 鈴⽊朱羅, 福原洸, 加納剛史, ⽯⿊章夫, “安定かつ適応的な⾼速⾛⾏の実現
を⽬指した四脚ロボットの開発," ロボティク ス・メカトロニクス講演会2020, 2A1-K03,
2020.
⑤解剖学✖️ロボット工学
四脚動物は,移動運動のみならず,採餌や営巣など,驚くほど多芸多彩な振る舞いを即時適応的に発現します.こうした即時適応的な振る舞いの背後では,複雑かつ精巧な動物の筋骨格系が重要な役割を果たしています.本研究では動物の精巧な身体構造のエッセンスとそのしなやかな身体を積極的に活用可能な運動制御メカニズムの理解を目的とします.
現在は身体の中でも前肢に注目しています.多くの四脚動物において,前肢と体幹は骨同士で関節しておらず,筋肉によって繋ぎ止められています.この構造によって生じる柔軟性が運動時にどんな役割を果たしているのか,シミュレーションや実機を用いて調べています[1,2,3].また最近は,食肉類や霊長類などの一部の動物種が持つ前腕の回転自由度(回内-回外)にも着目しています[4].
[1] A. Fukuhara, et al., “Development of Quadruped Robot That Can Exploit Shoulder Hammock Structure”. 2020 IEEE/SICE International Symposium on System Integration (SII), 2020.
[2] A. Fukuhara, et al., “A Bio–inspired Quadruped Robot Exploiting Flexible Shoulder for Stable and Efficient Walking”. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
[4] H. Amaike, et al., “Simulation of quadruped robot walking considering anatomical features of distal forelimb”. The 9.5th international symposium on Adaptive Motion of Animals and Machines (AMAM), 2021.